1/9








测量 - 前方交会、后方交会、距离交会
1K+下载次数
2MB大小
1.1.1(17-09-2016)最新版本
详情评价版本信息
1/9
测量 - 前方交会、后方交会、距离交会介绍
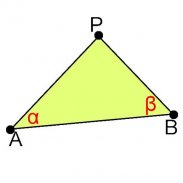
1.前方交会:
由两个已知座标点(A,B),测量观察点(P)水平∠A(α)和∠B(β),计算点P的座标
其中:30°<α,β<120°
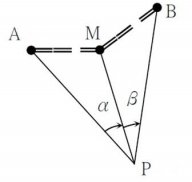
2.后方交会:
自欲测点(P)观测三已知座标点(A,M,B)之水平角∠α及∠β,推算P点之座标。
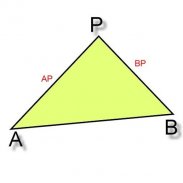
3.距离交会:
自二已知座标点(A,B),量测一欲测点(P)之距离(AP,BP),推算P点之座标。
</div> <div class="show-more-end">
保证非恶意应用此应用已通过病毒、恶意软件和其他恶意攻击的安全测试,不含任何威胁。
测量 - 前方交会、后方交会、距离交会 - APK信息
APK版本: 1.1.1程序包: tw.idv.tsaimh.surveying名称: 测量 - 前方交会、后方交会、距离交会大小: 2 MB下载次数: 12版本: 1.1.1发布日期: 2020-05-18 19:33:09最小屏幕: SMALL支持的CPU:
程序包ID: tw.idv.tsaimh.surveyingSHA1签名: 7B:5E:C4:95:AE:3A:98:97:85:ED:81:F9:E7:C6:53:06:B2:E7:BB:58开发商 (CN): tsaimh组织 (O): idv本地 (L): 国家/地区 (C): tw州/市 (ST):
测量 - 前方交会、后方交会、距离交会的最新版本
1.1.1
17/9/201612 下载次数2 MB 大小














同类应用
您可能还会喜欢……

English






